
About Me
Experience
Trainer on Executive Board, Cornell Maker Club– Ithaca, NY
Mar 2025 - Ongoing

- Lead trainees through a 40 minute explanation of the lab safety protocols and location of usable items in our
Electrical lab and Mechanical lab. After trainings the trainees get access to our labs
- Communicate in weekly meetings to discuss future plans for trainings, future plans for organization of the labs,
and general updates for progress that has been made since the last meeting
- Answer questions and guide makers through the labs and assist with usage of lab equipment (i.e., 3D printers,
soldering equipment, power supplies, etc.)
Front of House Support, Donation Intaker, and Processor of Furniture, Ithaca Reuse Center -- Ithaca, NY
Sep 2024 – Ongoing
- Organize electronics, furniture, automotive parts, gardening supplies, and household items in the store.
- Intake approximately 300 donations a workday of reusable items.
- Process, inspect, price, and display furniture and household items for sale.
Lead Computer Aided Design Technician, Ace Robotics 72 FTC Team 21503 Trumbull, CT
Sep 2022- Feb 2024

- Earned a Connecticut State Scoring Record (2023) the FTC State Tournament win (2023), and World
Tournament Qualification (2023).
- Designed the final robot with lift, intake, and drive systems in Onshape, including a linear slide, claw, Mecanum
wheels, and a hexagonal piece scooping mechanism.
- Expanded team membership threefold (2024) and collaborated with programmers to refine encoder
measurements for autonomous movement.
Projects
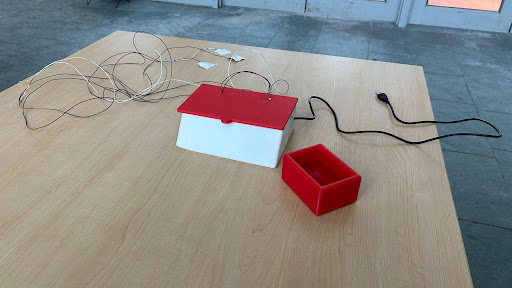
Electrocardiogram
Developed Differential Amplifer, Notch Filter, and Low Pass Filter. In connection with pennies as electrodes, a heart rate signal is recorded and your heart rate is supposed to be monitored in real time. Project was created for the Cornell 2025 Make-a-thon
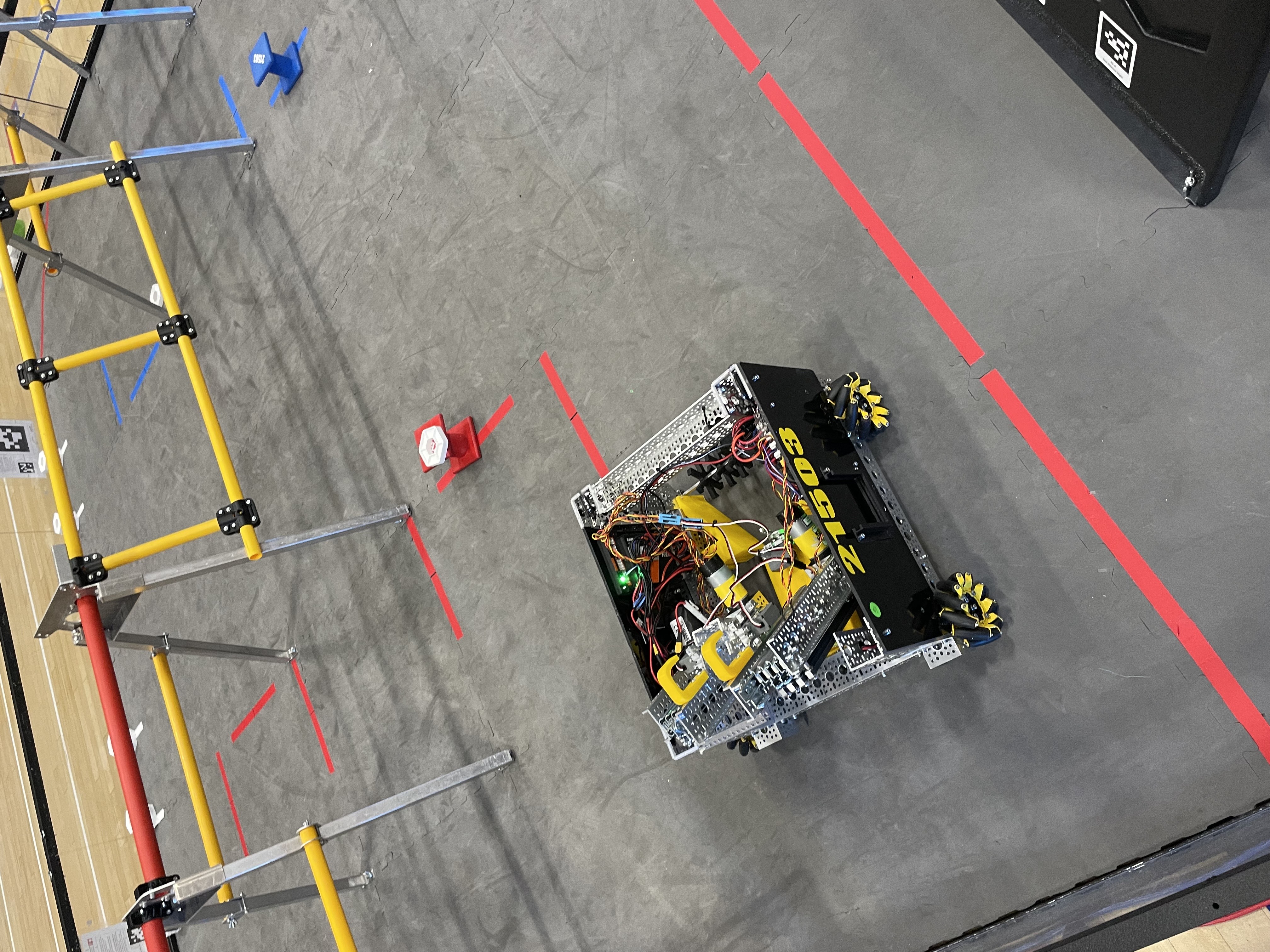
First Tech Challenge (FTC) Robot
As a part of FTC Centerstage, developed a hanging mechanism, pixel collector, and paper airplane shooter utilizing a linear slide, 3D printed parts, servos, and other motors.
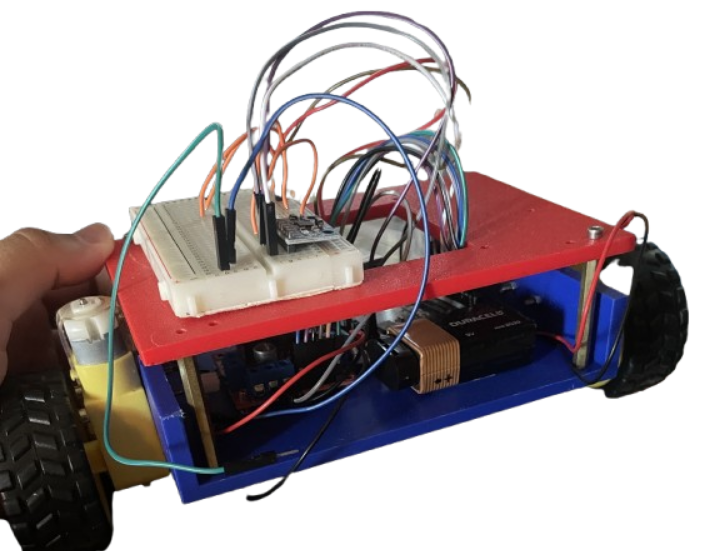
Self Balancing Robot
Created a self balancing robot utilizing an Arduino Uno, L298N Driver Module, an MPU6050, and 3D printed parts modeled on OnShape.